Первый советский инерциальный всеширотный комплекс "Тобол"
Вместо введения.
Баку. Каспийское высшее военно-морское училище имени С.М. Кирова. Пятый курс.
Весной 1972 г. приехал с преподавательской практики наш любимый преподаватель капитан 1 ранга И.Л. Галин и на первой же лекции
взволнованно и очень торжественно сообщил, что принят на вооружение ВМФ первый советский инерциальный навигационный комплекс "Тобол".
Тогда я еще не знал, что эти события будут иметь ко мне прямое отношение.
Эти строки я написал в своих воспоминаниях о службе на К-460. Сейчас решил начать именно с этих фраз, чтобы передать чувства от новости
о НК "Тобол". Правда, сейчас известно, что НК "Тобол" весной 1972 г. ещё не был принят на вооружение ВМФ, но это в общем впечатления не меняет.
Ведь мы о нём и не слышали и не догадывались, что идёт длительная и большая работа по инерциальной навигации.
Читая книгу Дж. Калверта "Подо льдом к полюсу", командира американской атомной подводной лодки "Скейт", перевод на русский язык которой
произвёл недавний Главнокомандующий ВМФ и тогда уже вице-адмирал запаса Николай Герасимович Кузнецов, мы знали, что на эту лодку американцы
приспособили ракетную инерциальную систему, которая могла заменить сразу несколько традиционных навигационных приборов.
И хотя ожидаемый эффект от неё не вполне оправдался, но сам факт использования инерциальной системы открывал хорошую перспективу
для повышения точности плавания, особенно в приполюсном районе.
А пока нам прочли всего восемь часов по теории инерциальных навигационных систем (ИНС) и мы продолжали углублённо изучать всеширотный
навигационный комплекс "Сигма" на шаровых гироскопах, который стоял у нас в училище.
Поэтому информация о принятии на вооружение инерциального комплекса "Тобол" вызвала у нас и восторг, и гордость, и оживлённое обсуждение
того, как он выглядит, какие там ИНС и на каких лодках он будет установлен.
Немного пояснений по теории инерциальных навигационных систем
Осведомлённые люди этот и следующий подразделы могут пропустить, а для не осведомлённых прочтение будет полезным.
Эти пояснения должны помочь читателю проникнуться глубиной и остротой наших чувств от получения в свои руки инерциальных навигационных
систем (ИНС), этого чуда научной и инженерной мысли, работающих в инерциальном пространстве бесконечного Космоса и делающих штурманов частицей его.
Забегая вперёд скажу, что снимая и помещая на графики очередные значения выходных параметров ИНС физически ощущал, как они, мои родные,
вылизанные до мелочей инерциальные навигационные системы, чутко отслеживают наше перемещение в пространстве, реагируют на малейшие управляющие
воздействия, а иногда не понимают меня и разбегаются. Тогда приходится трём штурманским головам соображать, как быть, какому каналу отдать
предпочтение и понять, где же мы на самом деле.
К счастью в моей практике таких случаев было всего три и они не влияли на безопасность плавания. Но заставляли задуматься и понимать, что
наши ИНС ещё не совсем совершенны. Поэтому работа над ними учёных, конструкторов и инженеров продолжалась и продолжается до сих пор.
Однако перейду к теории ИНС.
Ключевым словом в термине ИНС является - инерциальная, инерциальные.
Инерциальными называются такие системы, которые используют замечательное свойство любых тел - инерцию и ведут себя в соответствии
с законами механики, открытыми и сформулированными Ньютоном ещё в XVII веке.
Иссак Ньютон, великий английский учёный, совершивший немало открытий в устройстве и существовании нашего мира. Одно только яблоко,
упавшее на голову Ньютона и приведшее к открытию закона всемирного тяготения, чего стоит! Было это так, или нет, но одно неоспоримо
- наблюдательность, врождённая пытливость, умение вскрывать логические связи привели Ньютона к открытию и формулированию основополагающих
законов природы.
О Ньютоне наверняка каждый слышал ещё в школе, изучая физику. Узнал о нём и я в школьные годы, как и о трёх законах Ньютона, лежащих
в основе классической механики. Законы Ньютона являются аксиомами, т.е. не требующими доказательств, так устроена природа.
Учитывая, что инерциальные системы для навигационного комплекса "Тобол" разрабатывались ещё в середине XX века, то законы Ньютона изложу
в трактовке давних школьных и училищных времён, которые по форме отличаются от современных более точных формулировок. Но суть от этого не меняется.
Первый закон Ньютона - закон инерции. Как известно, этот закон гласит:
"Всякое тело находится в состоянии покоя или прямолинейного равномерного движения".
Это состояние тела обусловлено инерцией - свойством любого тела сохранять неизменную скорость своего движения, если нет воздействия
внешних сил, а также сопротивляться изменению этой скорости.
Действие первого закона Ньютона хорошо видно на примере маятника.
Подвесим на нитке грузик, нитку закрепим на неподвижном основании. Грузик будет спокойно висеть, а нитка с определённой точностью обозначит
вертикаль. Подобное устройство раньше широко применялось в строительстве и называлось отвесом.
Да наверное каждый его хоть раз использовал, даже будучи ребёнком. Хотя допускаю, что не каждый подозревал, что он пользуется
первым законом Ньютона.
Интересно, что грузик будет также спокойно висеть, например в самолёте, летящем на большой высоте с постоянной скоростью в отсутствие болтанки.
В этом явлении и проявляется первый закон Ньютона - грузик либо находится в покое, либо перемещается с большой скоростью относительно Земли,
при этом нитка подвеса сохраняет вертикальное положение.
Второй закон Ньютона - закон движения. Связывает внешнюю силу F, приложенную к телу, с массой тела m и ускорением a,
которое при этом получает тело.
Он гласит, что "Изменение количества движения тела пропорционально движущей силе и происходит по направлению действия этой силы".
Позднее учёные сформулировали этот закон понятнее, суть формулировки в том, что если к телу приложить силу, то оно начнёт двигаться с ускорением.
При этом ускорение при неизменной силе зависит от массы тела. Чем масса больше, тем меньшее ускорение получит тело и наоборот.
А если нужно придать одному и тому же телу различные ускорения, то нужно изменять силу. Именно поэтому взрослый бросает камушек дальше,
чем ребёнок.
Второй закон Ньютона описывается формулой;
F=ma
где F - сила, прилагаемая к телу;
m - масса тела;
a - ускорение, получаемое телом.
Очень интересно то, что ускорение, получаемое телом, например, грузиком из первого примера, будет одинаковым как при воздействии на сам грузик,
так и на основание, к которому подвешен грузик. Т.е. нитка грузика отклонится на один и тот же угол как при толчке грузика силой F, так и при таком
же толчке основания силой F и придания ему ускоренного движения.
Это важнейшее явление натолкнуло учёных на мысль об измерении ускорения тела, например, маятника на движущемся объекте, путём измерения
угла отклонения подвеса. А зная ускорение, полученное движущимся объектом, можно вычислить скорость, которую получил движущийся объект, путём
интегрирования ускорения.
где v(t) - скорость, a - ускорение, t - время.
Так возникает прообраз инерциального измерителя скорости, а с ним и инерциальной навигационной системы.
Для удобства использования в инерциальной навигации второй закон Ньютона записывают обычно так:
a=F/m
Третий закон Ньютона - закон противодействия сил.
Он гласит, что "Действию всегда есть равное и противоположное противодействие, иначе, взаимодействия двух тел равны и противоположны".
Несколько пространное на первый взгляд определение закона, данное Ньютоном, привело к множеству его трактовок и особенно примеров его действия,
значительно отличающихся друг от друга и иногда даже парадоксальных и вызывающих недоразумения.
Однако в увязке с первым и вторым законами, формулировка третьего закона Ньютона становится простой и понятной.
Ведь тело не может быть само по себе, оно всегда находится во взаимодействии с другим телом. Книга на полке, человек, стоящий на земле,
трактор, едущий по болоту и т.д. Другим телом может быть и воздух, физическое поле. Например, можно подвесить шарик в воздушной струе,
а можно подвесить его в электростатическом или магнитном поле.
И вот третий закон Ньютона и говорит о том, что для тела, находящегося в покое или равномерном прямолинейном движении на какой-то опоре
или в другом типе взаимодействия с другим телом или телами, сила действия этого тела равна взаимодействующих других сил.
При этом природа действующей и противодействующей сил всегда одинакова. Например, если сила действия гравитационная, т.е. книга давит
на полку своим весом, то и сила противодействия полки на книгу тоже гравитационная. Равенство этих сил и противоположность направлений и
не даёт книге упасть с полки.
Третий закон Ньютона можно записать в виде формулы:
![]()
где векторы F - силы действия и противодействия.
Третий закон Ньютона играет большую роль в инерциальной навигации, потому что именно он вызывает погрешности в работе измерителей ускорения.
В первую очередь это силы гравитации и трения. С какой силой давит инерциальный измеритель ускорения на опоры, с такой же силой опоры давят на
измеритель. С какой силой измеритель пытается справиться с силой трения, с такой же силой трение сопротивляется измерителю.
Борьба с противодействующими инерциальному измерителю скорости и их изменениями в процессе работы продолжается уже многие десятки лет.
Чего только не придумали и продолжают придумывать! И снижать весовое воздействие на опоры, помещая чувствительный элемент в жидкость
и создавая практически нулевую плавучесть, и снижать трение различными смазками и конструкцией опор, и много-много других способов и конструкций
сделали, чтобы повысить точность измерения скорости инерциальным способом.
Подводя итог пояснениям по теории ИНС можно сказать, что действия первого и второго законов Ньютона делают возможным сам принцип
инерциальной навигации.
А действие третьего закона Ньютона затрудняет инерциальную навигацию. Борьба с его проявлениями занимает очень большую часть научных
и конструкторских работ по созданиию ИНС и до сих пор не закончена. Хотя и вышла на получение точностей, обеспечивающих решение практических задач.
О некоторых принципах построения инерциальных навигационных систем
В предыдущем подразделе я показал, как можно получить измеритель скорости движущегося объекта на основе законов Ньютона.
Однако теоретически возможное получение инерциального измерителя скорости ещё не означает, что этот измеритель сразу решает задачи навигации.
Чтобы возможное стало реальностью, нужно решить минимум три сложнейшие научные и технические проблемы:
- создать высокоточный инерциальный измеритель ускорения как техническое устройство;
- создать систему высокоточных инерциальных измерителей ускорения, т.к. один измеритель может измерять только одну составляющую вектора ускорения
объекта, на котором он установлен;
- создать математический аппарат и технические устройства комплексной обработки всех измеряемых составляющих ускорения и на их основе
- решение навигационных задач.
Высокоточные инерциальные измерители ускорения получили название акселерометры.
А системы акселерометров с комплексной обработкой составляющих ускорения, их интегрирования, получения составляющей скорости объекта
и решения задач навигации вблизи поверхности Земли, получили название инерциальные навигационные системы.
Принцип действия акселерометров при общей их схожести - использовании инерции чувствительной массы (ЧМ), может быть разным.
По виду перемещения ЧМ акселерометры разделяются на измерители с линейным перемещением и с угловым перемещением инерционной массы ЧМ.
Первые получили название осевых акселерометров, а вторые - маятниковых акселерометров. Прообразом маятниковых акселерометров является
рассмотренный выше отвес или маятник.
В ИНС НК "Тобол" применялись маятниковые акселерометры, поэтому в дальнейшем я буду говорить только о них.
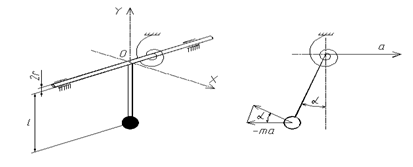
На рисунке, взятом из интернета, показана конструкция маятникового акселерометра.
Масса ЧМ обозначена буквой m, длина подвеса (плеча) - l, ускорение - a.
ИНС на основе только акселерометров.
Разработка принципов построения ИНС на основе акселерометров была начата ещё в первой половине XX века и продолжается до сих пор.
Такие ИНС привлекают своей простотой, небольшими габаритами и широким диапазоном применения. С развитием микроэлектроники и микроэлементов
ИНС на акселерометрах получили новый импульс и их используют в последние годы в самых различных устройствах.
Кроме того, двукратным интегрированием измеренных ускорений относительно легко получить составляющие скорости объекта, а по ним - курс, точнее
путь, по которому перемещается объект. Умножая скорости на время движения легко получить пройденные расстояния по составляющим, а от них довольно
просто перейти к приращению координат относительно начальной точки. Тем самым получить и текущие координаты объекта.
Используя свойство ЧМ акселерометра устанавливаться в вертикали места, можно получать и текущие углы качек.
Для получения полной информации о положении и движении объекта, на нём устанавливают несколько акселерометров, в некоторых случаях до
двенадцати.
Отсюда видно, что ИНС заменяет собой несколько традиционных приборов - компас, лаг, счислитель пути, стабилизатор горизонта.
Более подробно о таких ИНС можно ознакомиться, например, в этой статье:
А.Н. Соловьёв. Безгироскопная инерциальная навигационная истема на основе акселерометров. МЭС-2012
При всех положительных качествах ИНС на акселерометрах имеют один существенный недостаток - низкую точность и поэтому малое время автономной
работы в заданных пределах выработки и хранения навигационной информации.
Для задач, где требуется автономная работа в течение недель и месяцев, например, для подводной навигации и выработки навигационных данных
стрельбы, ИНС на акселерометрах не годятся.
Кроме того, акселерометр не чувствует положение объекта на Земле, ему безразлично, какова широта и долгота точки измерения ускорений,
а также под каким углом находится ось платформы с акселерометрами по отношению к меридиану географической координатной сетки Земли.
Поэтому ИНС на акселерометрах не может выработать координаты места и курс, они вычисляются на основе полученных измерений
и поэтому требуют начальных значений.
Это тоже существенный недостаток ИНС на акселерометрах
ИНС на основе гироскопов и акселерометров.
Проблема низкой точности ИНС на акселерометрах была решена применением гироскопов, размещённых на том же основании и в той же плоскости,
что и акселерометры. Такое решение было найдено ещё в 30-40-х года XX века и в настоящее время достигло просто фантастической точности.
Не буду вдаваться в подробности, скажу только, что создание ИНС на акселерометрах в начале XX века была невозможна в силу их погрешностей
на подвижном основании. Основной причиной была возмущаемость на маневрировании.
В 1923 году немецкий инженер М. Шулер, работая в одноимённой фирме двоюродного брата Антшютц, создающей гироскопические приборы,
опубликовал открытие о том, что если период колебаний маятника, в том числе гироскопа с пониженным центром тяжести, будет равен 84.4 минуты,
то такой маятник, а значит и гироскоп гирокомпаса будет невозмущаем при маневрировании корабля. Этот период подучил название "Период Шулера".
Математически это означает, что если маятник имеет длину подвеса, равным радиусу Земли, то его чувствительная масса помещается в центр Земли и
ни при каком движении основания (точки подвеса) по поверхности Земли не будет возмущаться.
Понятно, что физически такой громадный маятник создать невозможно, поэтому продолжались интенсивные поиски решения такой технической задачи.
В 1932 году советский учёный и инженер Евгений Борисович Левенталь пришел к выводу о возможности создания невозмущаемого физического маятника
на основе акселерометра и гироскопа с использованием интегральной коррекции гироскопа.
В 1938 году советский учёный Борис Владимирович Булгаков разработал теорию подобного физического маятника, которую описал в книге "Прикладная
теория гироскопов", ГОНТИ-1939 год.
Однако создать подобный физический маятник удалось только в Германии к середине войны для ракеты Фау-2.
После войны интенсивные работы по созданию ИНС на основе элементов "гироскоп-акселерометр" были развёрнуты в СССР, США и некоторых других
странах для нужд ракетных программ.
Гироскоп - это вращающееся тело.
Термин "гироскоп" впервые употребил Жан Бернар Леон Фуко в своём докладе во Французской академии наук в 1852 году о способах экспериментального
обнаружения вращения Земли. Один из способов основан на движении быстровращающегося ротора, подвешенного в трёхстепенном кардановом подвесе.
Этот прибор Фуко и назвал гироскопом, образованном от двух греческих слов: Гирос - вращение, Скопео - вижу, наблюдаю.
Основным свойством гироскопа является способность сохранять неизменное положение в инерциальном пространстве. Как бы ни двигалось
и вращалось основание гироскопа, он всегда будет сохранять первоначально заданное направление.
Расположимся поудобнее в инерциальном пространстве, но не очень далеко от Земли и посмотрим на работу свободного гироскопа.
Для этого нужно запустить видеоролик.
Свободным называется такой, на который не действуют внешние силы. Как видно, для наблюдателя в инерциальном пространстве
гироскоп сохраняет направление независимо от вращения Земли.
Почему это происходит, единого мнения нет. Так устроена Вселенная и для обеспечения устойчивости в ней любое тело должно вращаться.
Поэтому вращаются галактики, звёздные системы, сами звёзды, планеты и другие устойчивые объекты.
И это замечательное свойство гироскопа люди открыли и научились использовать его для своих нужд.
Гироскоп устойчив к ударам, на кратковременные воздействия он практически не реагирует.
Устойчивость гироскопа характеризуется кинетическим моментом Н - вектором, направленном вдоль оси вращения гироскопа.
Величина вектора Н зависит от массы ротора и скорости его вращения: больше масса или скорость вращения, больше вектор Н и устойчевее гироскоп.
И наоборот.
Поэтому удаётся получить очень устойчивый гироскоп совсем маленькой массы, несколько граммов, создавая ему громадную скорость вращения,
десятки и сотни тысяч оборотов в минуту.
Вторым свойством гироскопа является прецессия.
Прецессия - это разворот гироскопа при действии внешней силы, не удара. Движение происходит не туда, куда действует внешняя сила,
а в плоскости, перпендикулярной действию силы, и продолжается всё время, пока действует сила. Это свойство позволяет управлять гироскопом и изменять
его положение в инерциальном пространстве.
У гироскопа есть и другие свойства, но для понимания работы инерциального измерителя на основе гироскоп-акселерометр этих двух свойств
достаточно.
Ещё одним важным фактором, определяющим работу гироскопа и ИНС на основе инерциального измерителя гироскоп-акселерометр, являются
системы координат. Для работы таких ИНС используют три системы:
- горизонтную с центром в точке наблюдателя (объекта размещения ИНС);
- географическую с центром в центре Земли;
- инерциальную, связанную с Солнцем и звёздами. Центр этой системы для решения различных задач помещают в центр Земли, или в центр масс Солнца,
или в любую другую точку пространства, главное, чтобы её оси были связаны со звёздами и не меняли своего положения в рассматриваемый
промежуток времени и в ней выполнялись законы Ньютона и аксиомы динамики классической механики.
Горизонтная система координат связана с горизонтальной плоскостью, касательной к поверхности Земли, и ориентированной по направлению
на Северный полюс. При этом для таких рассуждений, как наши допускается, что Земля - шар (сфера).
Вертикальная её ось Z направлена вверх к точке зенита. Горизонтальные оси перпендикулярны друг к другу. Одна из них направлена на север-юг N-S,
вторая на восток-запад E-W.
Именно в этой системе работает маятник и акселерометр, именно в этой системе движется корабль, и относительно этой системы рассматривается
движение гироскопа.
Центр горизонтной системы координат всегда расположен в точке наблюдателя и перемещается вместе с ним по поверхности Земли.
Географическая система координат представляет собой систему параллелей и меридианов и позволяет однозначно описать положение места наблюдателя на Земле. Место характеризуется широтой Ш и долготой Д. Географические координаты измеряются в градусах. Широта отсчитывается от плоскости экватора к северу N к югу S от 0 до 90 градусов. Долгота отсчитывается от плоскости нулевого меридиана от 0 до 180 градусов к востоку E и к западу W.
Инерциальная система координат во времена разработки НК "Тобол" именовалась инерциальным пространством. Инерциальное пространство,
в котором гироскоп сохраняет неизменное положение, также имеет три координаты, направление которых привязано к положению звёзд.
В современной теории ИНС инерциальное пространство имеет несколько другой смысл, а инерциальная система координат называется инерциальной
системой отсчёта. Эти понятия более точные и необходимы для математического аппарата ИНС. Но для наших общих рассуждений достаточно ограничиться
прежним понятием - инерциальное пространство, знать, что гироскоп в нём сохраняет неизменное положение и мысленно располагаться в нём для наблюдения
за движением Земли, горизонтной системы координат, акселерометров и гироскопов.
На втором ролике более четко видна горизонтная система координат, показана осями зелёного цвета. Оси обозначены N (север) - вдоль меридиана
наблюдателя, E (восток) - вправо на восток, Z (зенит) - вверх к зениту.
При вращении Земли горизонтная система координат сохраняет горизонтальное положение относительно поверхности, а маятник всегда располагается
вдоль оси Z. Поэтому за сутки он на неподвижном основании совершает полный оборот, но для наблюдателя на Земле маятник находится в покое.
При движении наблюдателя по поверхности Земли маятник отклоняется от оси Z на угол, пропорциональный ускорению и вновь устанавливается
в вертикаль с началом равномерного движения.
Также видно, что для наблюдателя в инерциальном пространстве восточная часть горизонта опускается, а западная поднимается. И значит гироскоп
над восточной частью горизонта видимым образом будет подниматься, а над западной - опускаться, описывая за сутки полный оборот относительно
вертикали. Таким образом происходит физическая связь горизонтной и инерциальной систем координат.
Это явление используется для воздействия на гироскоп с помощью маятника, в результате гироскоп приобретает свойство гирокомпаса и сам находит
меридиан наблюдателя горизонтной системы координат.
В ролике свободный гироскоп установлен в Москве, примерные координаты Ш=55.7 сев, Д=37.6 вост.
Вся координатная сетка географических координат не показана, для иллюстрации рассужений параллели и меридиана наблюдателя достаточно.
Примечательно, что если перемещать гироскоп в другую точку по поверхности Земли, он будет видимым образом изменять угол наклона относительно
горизонта, сохраняя неизменное положение в инерциальном пространстве. При этом угол будет зависеть от широты другой точки.
Иными словами, если мы в Москве сориентируем гироскоп на Полярную звезду, где её высота будет равна 55.7 градусов, то при перемещении
на экватор ось вращения гироскопа станет практически горизонтальной. Соответственно на Северном полюсе она будет почти вертикальной,
направлена вверх. Т.е. гироскоп чувствителен к широте!
На этом явлении и построена ИНС с измерителями гироскоп-акселерометр.
Работу инерциального измерителя с интегральной коррекцией иллюстрирует третий видеоролик.
Располагаемся для наблюдения как и прежде в инерциальном пространстве недалеко от Земли. Весь Земной Шар в кадр не помещается, поэтому
ограничимся небольшим районом с водной поверхностью. На нём покажем зелёным цветом горизонтную систему координат N-E-Z.
На платформе измерителя разместим двухстепенной гироскоп и маятниковый акселерометр. Вертикальная ось маятника направлена вверх
и параллельна вертикали места Z (показана голубым цветом). Угол отклонения маятника от вертикали измеряется датчиком угда ДУ, показан синим цветом.
На рамке двухстепенного гироскопа размещены датчик момента ДМ (желтого цвета) и датчик угла ДУ (красного цвета) отклонения оси гироскопа
от вертикали.
Датчик момента ДМ создаёт вертикальный момент M силы F. А датчик угла ДУ формирует сигнал, пропорциональный углу отклонения
оси гироскопа, выдаёт его на двигатель стабилизации платформы измерителя, показан серым цветом. Инерциальные измерители с такой обратной связью
называют иногда измерителями или одноканальными ИНС замкнутого типа.
Важным элементом инерциального измерителя является интегратор в цепи сигнала на датчик моментов ДМ гироскопа. Он интегрирует ускорение, пропорциональное измеренному углу отклонения маятника и, соответственнно, отклонению горизонтной системы координат в инерциальном пространстве.
Работа инерциального измерителя с интегральной коррекцией заключается в следующем.
С началом работы измерителя из-за вращения Земли и движения корабля платформа отклоняется от горизонтали. В видео ролике показано движение на юг.
Как только начинается отклонение платформы, маятник акселерометра отклоняется от вертикали Z горизонтной системы координат, а сигнал поступает в
интегратор.
Выше было показано, что угол отклонения маятника пропорционален угловой скорости вращения Земли и ускорению движения корабля по ней. Но платформа
отклоняется от горизонта пропорционально не ускорению, а горизонтальной скорости движения корабля.
Следовательно, для приведения платформы в горизонт нужно подать на ДМ гироскопа сигнал, пропорциональный горизонтальной скорости, а для этого
проинтегрировать измеренное акселерометром ускорение. Такую коррекцию гироскопа Е.Б. Левенталь назвал интегральной.
Величину момента М, прикладываемого к гироскопу, можно записать так:
Исследования показали, что если коэффициент К равен:

Н - кинетический момент гироскопа, R - радиус Земли,
то период собственный колебаний инерциального измерителя гироскоп-акселерометр будет равен 84.4 минуты, периоду Шулера. А значит этот
измеритель будет невозмущаем на маневрировании корабля.
Конструктивно добиваются получения кинетического момента Н гироскопа, удовлетворяющего условию невозмущаемости, а с ним и высокой точности
работы инерциального измерителя.
И последнее, пожалуй самое важное в работе инерциального измерителя с интегральной коррекцией - он вырабатывает инерциальный курс и
инерциальную широту.
После интегрирования угла отклонения маятника акселерометра получаем горизонтальную скорость движения платформы по Земле, а путём деления её
на радиус Земли - угловую скорость вращения горизонтной системы координат в инерциальном пространстве. В то же время она связана с географической
системой координат через курс и широту места. Поэтому если использовать два взаимно перпендикулярных инерциальных измерителя, они буду сами
устанавливаться в положение, соответствующее курсу и широте места! А высокоточное горизонтирование платформы даёт и углы качек.
Остаётся только снимать эти положения и использовать их для целей навигации.
Долготу, к сожалению, такие инерциальные измерители как и измерители на акселерометрах, тоже не чувствуют. Поэтому долгота в ИНС рассчитывается
относительно начального значения, как говорят, ИНС хранит долготу.
Для повышения точности измерения скорости движения платформы в инерциальном пространстве углы относительно горизонта снимают не с акселерометров,
а с гироскопов. Их более плавное движение вследствие прецессии сглаживает показания акселерометров, что существенно повышает точность измерений.
Для стабилизации платформы в азимуте, на них устанавливают ещё два гироскопа, азимутальных. Их подвесы обеспечиывают свободу прецессии в
горизонтали.
Азимутальные гироскопы и горизонтные инерциальные измерители могут устанавливаться на одной платформе, а могут на разных. В ИНС "Тавда"
использовались две платформы - горизонтная и азимутальная. При этом азимутальная была свободна в азимуте, т.е. удерживала постоянное направление
в инерциальном пространстве.
В процессе создания НК "Тобол" советскими учёными были разработаны и сейчас продолжают разрабатываться математические модели поведения ИНС и математические зависимости, связывающие все три системы координат, которые позволяют получать весь комплекс однозначных и высокоточных параметров движения объекта по Земле.
Более подробно с теорией ИНС на измерителях гироскоп-акселерометр можно ознакомиться в специальной литературе, например здесь:
Л.М. Селиванова, Е.В. Шевцова ИНЕРЦИАЛЬНЫЕ НАВИГАЦИОННЫЕ СИСТЕМЫ. МВТУ им. Баумана, 2012
И собственно об истории создания инерциальных навигационных систем "Тавда" и навигационного комплекса "Тобол"
История создания инерциальной навигационной системы "Тавда" неразрывно связана с историей советского ракетного ружия.
С одной стороны, ИНС "Тавда" создавалась для обеспечения баллистических ракет подводных лодок. А с другой - основополагающие элементы
ИНС, гироскопы и акселерометры, а также системы интегральной коррекции, разрабатывались и производились на предприятиях ракетной промышленности.
Правда и сами они, по крайней мере, некоторые из них, были созданы на базе предприятий судостроительной промышленности или входили в состав МСП.
Вот такая получилась взаимосвязь.
Немного о них.
НИИ-944
В 1939 году в составе Наркомата судостроительной промышленности для разработки и производства гироскопических и радиолокационных систем
был создан "Научно-исследовательский институт №10", НИИ-10. С 1945 года в нём работал талантливый учёный, инженер и организатор Кузнецов
Виктор Иванович.
После окончания войны в Советском Союзе была развёрнута программа по созданию баллистических ракет, которая включала также разработку элементов, приборов и систем управления ракетами. Так как эту отрасль промышленности нужно было создавать с нуля, то решено было воспользоваться опытом и научно-производственными мощностями судостроительной промышленности, которая выпускала гироскопические устройства и счётно-решающие системы для флота уже в течение десятков лет.
В качестве головного разработчика систем управления ракет был привлечён НИИ-10. Сначала работы проводились на основе личных контактов
С.П. Королёва и В.И. Кузнецова, причём В.И. Кузнецов стал членом неформального Совета главных конструкторов С.П. Королёва.
В 1946 году для разработки гироскопических командных приборов баллистических ракет в НИИ-10 был создан Отдел №2, который в 1947 году
возглавил В.И. Кузнецов.
В 1953 году Отдел №2 НИИ-10 был преобразован в Специальное конструкторское бюро СКБ НИИ-10, а в 1955 году на базе СКБ НИИ-10 был создан
Научно-исследовательский институт гироскопической стабилизации, НИИ-944, в составе Министерства судостроительной промышленности.
Главным конструктором НИИ-944 был назначен В.И. Кузнецов.
Интенсивная и плодотворная работа НИИ-944, находящегося по-прежнему в составе судостроительной промышленности, привела к разработке
инерциальных систем управления для баллистических ракет, в первую очередь Р-7 и Р-7А.
Уже в 1957 году ракетой Р-7 был запущен первый искусственный спутник Земли.
В 1960 году НИИ-944 разработал полностью автономную инерциальную систему управления для баллистической ракеты Р-12.
А в 1963 году НИИ-944 создал принципиально новый инерциальный прибор - гиростабилизированную платформу КИ21-9.
Существенно продвинулся НИИ-944 в разработке поплавковых измерителей. Уже к 1960 году им были созданы малогабаритные поплавковые гироскопы
КИ99-6А и поплавковые двойные интеграторы линейных ускорений КИ99-7А. В этих приборах измерительные элементы подвешены в жидкости с нулевой
плавучестью, что существенно снижает трение, обусловленное третьим законом Ньютона.
Интересна индексация изделий НИИ-944. Первые приборы и системы имели индекс И. Например, гироскопические приборы для ракет Р-7 и Р-7А:
гировертикант И55-1, гирогоризонт И11-1А-3, датчики регулятора скорости И12-6-3, И12-7-3. Но более поздние элементы и приборы
получили индекс КИ.
Что означали эти буквы, выяснить не удалось. Возможно, что И - изделие, а КИ - Кузнецов-Изделие.
Но это только предположение, не претендующее на истину.
К индексу КИ вернусь ниже при описании ИНС "Тавда".
Завод №706
Для производства приборов и систем управления ракетами, разработанных НИИ-944, был определён Московский завод №706,
тоже входивший в Министерство судостроительной промышленности и выпускавший гироскопические приборы для флота.
В июне 1953 года на заводе №706 были дополнительно организованы сборочный и маханический цеха, увеличены отделы Главного конструктора
и Главного технолога, созданы новые лаборатории.
С конца 1957 года завод №706 полностью перешел на производство, как тогда говорили, "кузнецовских" заказов.
Совместно с НИИ-944 завод №706 сыграл решающую роль в создании первой инерциальной системы "Тавда" для подводных лодок.
Начало работ по теме инерциальных навигационных систем для подводных лодок
Материалы взяты из статей 9 НИИ ВМФ. А.В. Федотов, Г.И. Емельянцев, Г.А. Левит, а также Емельянцев Г.И., Левит Г.А.
Создание и дальнейшее развитие отечественных корабельных инерциальных навигационных систем. Навигация и гидрография. 1998. № 7.
В 1954 году Совет Министров СССР принял постановление "О разработке морского оружия и техники", которым предписывалось наряду с другими
системами создание навигационного комплекса для подводных лодок.
Разработчиком был назначен Морской научно-исследовательский институт МНИИ-1, главным конструктором назначен Эрхард Иванович Эллер.

МНИИ-1
История Морского научно-исследовательского института, МНИИ-1, в основном связана с разработкой вычислительной техники и управляющих систем
для флота. С 1971 года он преобразован в ЦНИИ "Агат", который разработал БИУСы "Альфа-3" и "Алмаз" для проекта 667Б. Довелось и мне побывать
в ЦНИИ "Агат" в Москве в 1973 году в период учёбы в 93 УЦ ВМФ, Палдиски, где мы осваивали навигационный корнтур БИУС "Алмаз".
Но тогда мы не знали, что был в истории период разработки навигационных комплексов для подводных лодок, а МНИИ-1 фактически явился
родоначальником первого советского инерциального комплекса "Тобол".
В соответствии с Постановлением СМ СССР от 1954 года МНИИ-1 разработал первый советский навигационный комплекс "Плутон" на роторных гироскопах.
Вариант для многоцелевых лодок, в том числе атомных, получил название "Плутон".
Усовершенствованный вариант для подводных лодок получил название "Плутон-1".
Оба варианта были созданы уже к 1957 году и устанавливались на подводные лодки проектов 627, 627А, 629 и 658. Вариант "Плутон-1" был установлен
на атомную подводную лодку с ЖМТ ЯЭУ К-27 проекта 645.
20 августа 1959 г. МНИИ-1 преобразован в «Московский электромеханический институт», МЭМИ. Работавший там главный конструктор НК "Плутон" Э.И. Эллер ещё в апреле 1956 г. был переведён в НИИ-944 и назначен его директором. На этой должности и с 1963 года в Государственном научно- техническом совете Совета Министров СССР, Э.И. Эллер был непосредственно связан с разработкой ИНС для подводных лодок.
Для истории НК "Тобол" интересным является то, что одним из ведущих конструкторов НК "Плутон" был Олег Васильевич Кищенков, будущий главный
конструктор инерциального навигационного комплекса "Тобол". С июля 1960 г. он работал в МЭМИ на должности заместителя главного инженера,
принимал непосредственное участие в решении различных научных, организационных и технических вопросов по созданию навигационных комплексов.
И поэтому естественным было то, что О.В. Кищенков, а также другие конструкторы и инженеры МЭМИ видели недостатки принципа построения
НК на отдельных гироскопических приборах и именно поэтому группа разработки первого инерциального НК была создана при МЭМИ, премнике МНИИ-1.
НИИ-303, будущий ЦНИИ "Электроприбор"
В 1953 году к разработкам гироскопических приборов для атомных подводных лодок был привлечён НИИ-303, в то время единственное предприятие,
обладавшее технологией изготовления шаровых гироскопов на аэродинамическом подвесе.
Поэтому институт приступил к созданию гироазимутов и гировертикалей на шаровых гироскопах, а также их комплексированию с гирокомпасами и
лагами. Кроме того, в НИИ-303 были разработаны ртурные относительные лаги, которые применялись в разработанных к 1957 году навигационных
коплексах "Плутон", а к 1961 году - в навигационных комплексах собственной разработки "Сила-Н" и "Сигма".
Главным конструктором НК "Сила-Н" и "Сигма" был Валентин Иванович Маслевский. В 1962 и 1963 годах участвовал в походах подводных
лодок К-3 и К-181 на Северный полюс для испытаний шаровых гироскопов НК "Сила-Н" и "Сигма" в сравнении с роторными гироскопами НК "Плутон",
а также проверки разработанной институтом математической модели квазикоординат в приполюсном районе. Был руководителем технической группы на
подводных лодках во время этих походов.
По результатам испытаний оба навигационных комплекса были приняты на вооружение ВМФ и устанавливались как на дизельных, так и атомных ракетных
и многоцелевых лодках.
Кроме того, НИИ-303 успешно разрабатывал уникальную тему - радиосекстаны для подводных лодок.
Первым серийным радиосекстаном был "Самум", который включён в состав навигационного комплекса "Сигма" ракетных подводных лодок проектов 629А,
658М и 667А. И хотя его использование требовало подвспытия лодки в позиционное положение, этот прибор оказал штурманам очень большую помощь.
Следующим радиосекстаном был перископный "Сайга". Он позволял проводить измерения уже в перископном положении, что повышало скрытность плавания
по сравнению с радисекстаном "Самум". Радиосекстан "Сайга" был включен в состав навигационного комплекса "Тобол" и "Тобол-Б" и устанавливался
на подводных лодках проекта 667АУ и первых четырёх лодках проекта 667Б.
Наиболее совершенным был следующий радиосекстан - "Снегирь". Это перископный комплекс, имевший несколько радио и оптических режимов
и позволявший определять место по большому количеству как естественных, так и искусственных объектов.
На моей лодке К-460 проекта 667Б был установлен радиосекстан "Снегирь", который настолько выручал нас в сложных условиях, что командир лодки
Сергеев Владимир Михайлович выразил мнение о награждении радиосекстана медалью. Пожелание хоть и шутливое, но отражает наше уважение к этому
сложному и надёжному устройству.
Таким образом, НИИ-303, в последующем ЦНИИ "Электроприбор", дал для будущего инерциального навигационного комплекса испытанный режим
квазикоординат, радиосекстаны и относительные лаги.
Первые реализации прообраза корабельной инерциальной системы
Несмотря на развёрнутую большую работу по созданию навигационных комплексов для подводных лодок, успешную разработку и испытания
навигационных комплексов на шаровых гироскопах, было ясно, что для будущих разрабатываемых дальнобойных морских ракет эти комплексы
не годятся. В первую очередь потому, что они не "чувствуют" широту и курс, они их хранят подобно долготе. А во вторую очередь - дрейфы, т.е.
стабильность шаровых гироскопов хотя и были значительно меньше, чем у роторных, но всё же недостаточны для длительного хранения навигационных
параметров.
Выход виделся в создании инерциальных навигационных систем, хотя это направление считали перспективным не все.
Попытки сотрудников НИУ ВМФ развернуть в судостроительной промышленности работы по созданию ИНС для ВМФ в течении ряда лет успеха не имели.
Это объяснялось сложностью подлежавших решению технических проблем, отсутствием необходимой элементной базы, недостаточным теоретическим заделом
и рядом обстоятельств субъективного характера.
К счастью, в мае 1960 г. по инициативе сотрудника АН СССР Израиля Давидовича Блюмина коллективы НИИ-944 и Завода №706 Министерства
судостроительной промышленности предложили ВМФ разработать и испытать в натурных условиях корабельный комплекс инерциальной навигации (КИН)
на базе ракетного автоштурмана. Эта идея получила всестороннюю поддержку НИУ ВМФ и Управления Гидрографической службы ВМФ и экспериментальные
работы были развёрнуты.
Надо полагать, что Академии Наук СССР, НИИ-944, Заводу №706, командованию и учреждениям ВМФ было известно, что подобную инерциальную систему
установили на пла "Скейт" США для третьего полярного похода на Северный полюс. Может быть эта информация сыграла роль в положительном решении
для проведения испытаний ракетной ИНС в море.
Предполагалось экспериментально проверить ряд теоретических положений о временной и широтной зависимостях погрешностей КИН, об эксплуатационных свойствах поплавковых приборов в морских условиях, накопить опыт монтажа и начальной выставки ИНС на корабле, а также оценить возможность использования различных средств определения поправок к выходным навигационным параметрам.
Комплекс инерциальной навигации состоял из трех одинаковых ИНС с гиростабилизированными платформами (ГСП) на управляемых гироскопах
и предназначался для выработки координат местоположения и курса в высоких широтах. В системах предусматривался ввод сигналов на датчики момента
гироскопов для компенсации влияния угловой скорости вращения Земли.
В качестве основных элементов использовались двухстепенные поплавковые гироскопы КИ99-6А и поплавковые двойные интеграторы линейных
ускорений КИ99-7А.
Для уменьшения погрешностей, связанных с изменением положения гироскопов относительно гравитационного поля Земли, каждая ИНС была ориентирована
таким образом, чтобы в средней точке предстоящего маршрута (точке "ложного полюса") ГСП моделировали плоскость горизонта, а во всем остальном районе
плавания их негоризонтальность не превышала 10° .
Цифровые вычислительно-управляющие машины, как отмечалось, в те годы еще не получили достаточного развития. Максимальная простота аналогового
счетнорешающего устройства была обеспечена схемным решением и выбором меридианального маршрута.
Переход от координат КИН к географическим и обратно осуществлялся с помощью специального планшета, созданного в кратчайшие сроки
совместными усилиями подразделения абсолютных измерителей скорости НИУ и ЦКП (Центрального картпроизводства) ВМФ.
К осени 1961 г. НИИ-944 и Завод №706 изготовили комплекс инерциальной навигации, который был создан и установлен на судне.
Мореходные испытания КИН проведены в период с 26 по 31 октября 1961 г. в диапазоне широт 69–80°.
Плавание осуществлялось генеральным курсом 0 градусов до кромки льдов и в обратном направлении со скоростью 18–20 уз.
Участники испытаний понимали, что низкие характеристики основных чувствительных элементов, использование внутреннего демпфирования шулеровских
колебаний и отсутствие демпфирования суточного контура, а также неучет скорости корабля в сигналах управления ГСП и ряда других воздействий,
вряд ли позволят достигнуть высоких точностных параметров.
Однако проведенные испытания подтвердили возможность построения морских ИНС на поплавковых чувствительных элементах, необходимость
демпфирования шулерского и суточного контуров с использованием внешней информации, а также совершенствования основной элементной базы ИНС
и вычислительной техники.
После натурных экспериментальных испытаний КИН для привлечения организаций промышленности и институтов АН СССР к созданию принципиально новых
высокоточных чувствительных элементов ИНС и координации их работы по инициативе НИУ ВМФ и при содействии Института Автоматики и Телемеханики
Академии Наук СССР в 1961 г. при Отделении Технических наук АН СССР был организован Научный совет по проблеме "Научные основы построения систем
навигации и автоматических устройств с применением новых физических явлений".
Научный совет возглавил видный ученый – академик Б.Н.Петров.
В состав Совета от ВМФ вошли В.Д.Теплов, Е.А.Ананченко и Г.А.Левит. С 1962 г. в работе Совета и его секций принимал участие П.И.Малеев.
Совет сыграл важную роль в координации исследований и в создании элементной базы инерциальной навигационной системы (ИНС).
Наиболее остро стоял вопрос о гироскопах. Точностные параметры существовавших в то время поплавковых гироскопов, а также шаровых гироскопов
с аэродинамическим и аэростатическим подвесами ротора были на один-два порядка ниже требуемых.
Поэтому был решён вопрос о создании новых поплавковых гироскопов и акселерометров повышенной точности для морских ИНС на основе элементов
и технологий, применявшихся для производства ракетной техники.
Создание НИИ "Дельфин"
20 августа 1959 г. на базе Морского научно-исследовательского института №1, МНИИ-1, был образован «Московский электромеханический институт»,
МЭМИ с опытным производством.
В июле 1960 г. на должность заместителя главного инженера МЭМИ был назначен Кищенков Олег Васильевич, до этого работавший начальником
лаборатории завода №706. К этому времени О.В. Кищенков был уже опытным инженером-конструктором, занимавшимся производством ракетных систем
управления и их элементов, в том числе инерциальных систем. Надо полагать, что в ходе работы над технологиями производства ракетных ИНС,
О.В. Кищенков глубоко проникся инерциальной темой и понимал перспективность ИНС.
Поэтому, включившись в работу по навигационным комплексам "Плутон", заместитель главного инженера начал активно продвигать идею развёртывания
исследований и производства инерциальных навигационных систем для подводных лодок.
Не без его участия с группой единомышленников был создан и Научный совет АН СССР, и поданы предложения НИИ-944 и Завода №706 о создании и
испытаниях комплекса инерциальной навигации КИН. В результате активной и настойчивой работы, поддержаный вышестоящим руководством, О.В. Кищенков
добился того, что в МЭМИ была выделена группа во главе с ним для разработки инерциальной системы подводных лодок.
Этому решению способствовали и личные связи О.В. Кищенкова с НИИ-944, Заводом №706, учёными и сотрудниками Академии наук СССР, а также
поддержка НИУ ВМФ и Управления Гидрографической службы ВМФ. И то, что МЭМИ всё больше удалялся от навигационных комплексов в сторону
цифровых вычислительных машин и БИУС.
Немаловажным в организации группы О.В. Кищенкова было и то, что весной 1960 года было принято решение о создании атомного подводного ракетоносца
проекта 667А, а к декабрю 1960 г. Главный конструктор С.Н. Ковалёв представил технический проект 667А. И если вопрос с ракетой Р-27 и реакторами ВМ-4
был в целом ясен, то с навигационным комплексом ясности не было.
Вот что написал С.Н. Ковалёв по этому поводу.
========================================================
Для подводных лодок проекта 667А НПО «Азимут» (теперь ЦНИИ «Электроприбор») был создан добротный всеширотный НК «Сигма»
(главный инженер и главный конструктор В. И. Маслевский), основанный на шаровых гироскопах на воздушном подвесе.
Маслевский видел дальнейшее совершенствование навигации в последовательном совершенствовании комплекса «Сигма». В этом его поддерживало
и Министерство, включая самого министра Бутому, с которым на эту тему у меня было много дискуссий.
ЦНИИ «Дельфин» выступил с новой прогрессивной идеей создания инерциального навигационного комплекса (главный конструктор О. В. Кищенков),
построенного на поплавковых гироскопах и отличавшегося комплексной математической обработкой от различных источников.
Противниками Кищенкова были Маслевский и практически все руководство Министерства.
Настойчивость Кищенкова достойна восхищения и удивления. В Министерстве его выгоняли с совещаний, а он возвращался...
Лично я Кищенкова поддерживал, понимая, что только инерциальная навигация может обеспечить длительное плавание под водой в т.ч.
и в высоких широтах, и обеспечить необходимые параметры для ракетного комплекса.
В результате всех баталий победили Кищенков и инерциальная навигация, и для серийных ПЛ проекта 667А в ЦНИИ «Дельфин» был создан
навигационный комплекс «Тобол»
========================================================
Но то было позднее.
А тогда, в 1962 году в группе Кищенкова МЭМИ с привлечением НИИ-944 и Завода №706 был создан экспериментальный образец ИНС
полуаналитического типа "Уран".
Проведенные стендовые испытания позволили осуществить выбор наиболее рациональных коэффициентов демпфирования собственных колебаний системы,
выявили существенное влияние румба и ряда других источников погрешностей на точностные характеристики системы.
В частности, ИНС была построена на двух связанных между собой платформах: горизонтной ГП и азимутальной АП. На горизонтной платформе
были установлены инерциальные измерители с интегральной коррекцией на поплавковых гироскопах и акселерометрах, разработанных НИИ-944
на основе ракетных элементов. При этом обработка информации уже проводилась на ЭВМ собственной разаработки, чему способствовала цифровая
переориентация МЭМИ.
Азимутальная платформа была свободной в азимуте. Для определения дрейфов гироскопов и их компенсации в процессе запуска было внедрено
принудительное вращение азимутальной платформы относительно вертикальной оси за счет подачи на датчик момента (ДМ) азимутального гироскопа
соответствующего сигнала управления.
Результаты стендовых испытаний ИНС "Уран" были использованы в дальнейшем в НИИ "Дельфин" при разработке ИНС "Тавда".
К началу 1966 года стало понятно, что необходим специальный научно-исследовательский институт инерциальной навигации.
12 марта 1966 г. приказом Министра судостроительной промышленности № 00123 на основе группы О.В. Кищенкова и опытного производства МЭМИ
был организован НИИ морского гироскопического навигационного приборостроения №346, НИИ-346 с опытным производством. Начальником НИИ-346
и Главным конструктором назначен О.В. Кищенков.
23 апреля 1966 г. приказом МСП № 0208 НИИ-346 переименован в НИИ штурманского приборостроения «Дельфин», п/я В-8618.
Начальником и Главным конструктором НИИ "Дельфин" назначен О.В. Кищенков.
Общая характеристика инерциальной навигационной системы "Тавда" и навигационного комплекса "Тобол"
Новому институту было предписано создать инерциальную систему ИНС и новый навигационный комплекс с инерциальными системами для вооружения
подводных лодок проекта 667А.
Навигационному комплексу присвоено наименование "Тобол". Главным конструктором комплекса назначен О.В. Кищенков.
Сердцем НК "Тобол" была инерциальная система "Тавда" в составе трёх ИНС Т-21.
Все три ИНС были одинаковы, двухплатформенные полуаналитического типа со свободной азимутальной платформой в азимуте. ИНС называли каналами.
Три канала обеспечивали избыточность информации и позволяли разрешать неоднозначности, возникающие в работе ИНС.
Поплавковые гироскопы и акселерометры имели индекс КИ.
Буквально с первых дней общения со специалистами НИИ "Дельфин" довелось слышать, что эти буквы означают начало фамилии главного конструктора
О.В. Кищенкова. Но сейчас понятно, что это скорее всего не так. И гироскопы, и акселерометры для ИНС системы "Тавда" разрабатывались
и изготавливались отработанной связкой НИИ-944 - Завод №706 по заданию НИИ "Дельфин". Поэтому и маркировка изделий производилась по правилам,
принятым в ракетной промышленности.
Прояснение этого вопроса у живущих ныне ветеранов ясности не внесли, но версия о КИ - начальных буквах фамилии Кищенков не отвергается и
может быть так и было. Как красивая баллада, отдающая дань О.В. Кищенкову, создателю первого советского инерциального навигационного комплекса.
Ещё одним очень важным элементов ИНС, разработанным НИИ "Дельфин", явились индуктосины. Это высокочувствительные и высокоточные устройства,
обеспечивающие точный съём и измерение угла. Применялись в качестве датчиков углов, без которых работа инерциальных измерителей с интегральной
коррекцией была бы невозможна.
Спасибо Дзюбе Владимиру Георгиевичу за подсказку, он много работал с О.В. Кищенковым и был наблюдающим от ВМФ за созданием НК "Шлюз".
Инерциальные навигационные системы были установлены на специальной прочной плите, которая особым образом крепилась к корпусу лодки и исключала
деформации, возникающие при динамических воздействиях на качке и изменении глубины погружения. Плита являлась плоскостью отсчёта для всех ИНС
в горизонте, поэтому все ИНС были особым образом привязаны к ней с высокой точностью.
Кроме того, на плите крепилось оптическое устройство для отсчётного зеркала астрокорректора "Волна", что позволяло измерять высоты светил
с очень высокой точностью.
И конечно, на плите устанавливалось устройство оптической привязки ИНС к диаметральной плоскости лодки, к которой привязан был и ракетный
комплекс. Таким образом обеспечивалась единая отсчётная база, обеспечивающая требуемую точность навигационных параметров.
Обработка информации от ИНС производилась электронно-вычислительной системой, получившей наименование "Тавда-С".
Система "Тавда-С" включала две специализированные цифровые вычислительные машины Т-01, устройства обеспечения и выдачи данных в БИУС "Альфа-3".
Мощности каждой ЦВМ хватало для решения всех задач управления всех трёх ИНС и получения выходных навигационных параметров. Одна машина
была основной, вторая резервной.
Управление режимами работы ИНС, а также индикация состояния её работы производились с пульта управления, установленного в штурманской рубке
как часть пульта штурмана. На НК "Тобол" и впоследствии "Тобол-Б" пульт управления состоял из большого количества тумблеров и табло индикации.
Каждый тумблер включал тот или иной режим или индикацию канала.
На НК "Тобол-Б2", "Тобол-Б3" и других модификациях пульт управления был выполнен на клавишах, многопозиционных переключателях и кнопках.
Часть тумблеров для удобства была оставлена, как на предыдущих модификациях комплекса.
Среди режимов работы ИНС был и режим квазикоординат. Это результат работы НИИ-303, реализованный в НК "Сигма". Но в НК "Тобол" он был
реализован на качественно другом уровне, на основе цифровой техники.
Главным конструктором системы "Тавда" был назначен В.С. Зябрев.
Штурманский пульт НК "Тобол-Б" рпксн К-279 проекта 667Б. На переднем плане пульт управления ИНС.
Кадр из фильма, из интернета. За прокладочным столом стоит штурман Луконин Виктор Петрович

Штурманский пульт НК "Тобол-Б2". Отличался обрамлением шкал, которое хорошо видно в сравнении с предыдущим снимком.
Кнопочно-клавишный пульт управления ИНС не виден, но располагался на том же месте, что и на комплексе "Тобол-Б".
Кадр из фильма, из интернета. В штурманской рубке рпксн К-475 проекта 667Б командир лодки капитан 1 ранга Зубков Дмитрий Петрович.

Энергоснабжение и техническое обслуживание навигационного комплекса производилось системой "Перекоп".
Она включала пульт технического обслуживания ПТО, комплекс электропреобразователей и множество приборов управления.
ПТО и часть блоков устанавливались в гиропосту и в отсеках. Преобразователи на проекте 667Б устанавливались в агрегатной гиропоста в 4 отсеке.
На фото гиропост рпксн К-460 проекта 667Б. Видна часть пульта технического обслуживания.
Штурманские электрики К.Емяшев и С.Евтюшенков на вахте.
Фото из архива К.А. Емяшева.

Для обеспечения резерва и ведения счисления и прокладки пути традиционными методами в навигационный комплекс "Тобол" были включены
гирокомпасная система в составе трёх гирокомпасов "Маяк-2", относительный гидродинамический лаг "Ока", относительный индукционный лаг "Нарма-2"
и абсолютный лаг "Мечта-2".
Для курсоуказания в аварийном режиме в состав штурманского вооружения был включён магнитный компас КДЭ-П, не входивший в навигационный
комплекс. Очень он мне нравился! Устойчивый, хорошо поддавался уничтожению полукруговой девиации, надёжный. К счастью, им не пришлось
ни разу воспользоваться по прямому назначению, но само наличие КДЭ-П придавало уверенность.
Для измерения глубины под килём на лодках проекта 667Б были установлены два эхолота НЭЛ-6, а для измерения подлёдной части льда - два
эхоледомера ЭЛ-2.
Они в навигационный комплекс не входили, но были в заведовании БЧ-1.
Вторым важнейшим контуром навигационного комплекса "Тобол" был контур систем коррекции места и курса "Обь-1С"
В него входила система "Обь", включающая ЦВМ Т-01 с обеспечивающими стойками, а также большой комплект автономных и радионавигационных
спутниковых систем.
Система "Обь-1С" обеспечивала полный комплекс подготовки астронавигационных систем к обсервации, автоматическое ими управление после подъёма
перископных частей и автоматическую обработку измерений.
Это сводило время измерений и обработки обсервации к мимимуму, что обеспечивало скрытнеость плавания.
Среди автономных систем нужно отметить в первую очередь астрокорректор "Волна" и радиосекстан "Сайга". В составе НК "Тобол-Б2"
вместо него устанавливался радиосекстан "Снегирь".
Кроме них, на лодках проекта 667Б устанавливались перископные системы МТ-70-8 и ПЗНГ-8М. Они также имели каналы измерения высот светил
и могли использоваться в качестве резервных средств определения места.
На фото - на лодке проекта 667Б подняты МТ-70-8, АК "Волна" и РС "Снегирь".
Фото из архивов членов экипажа рпксн К-460.
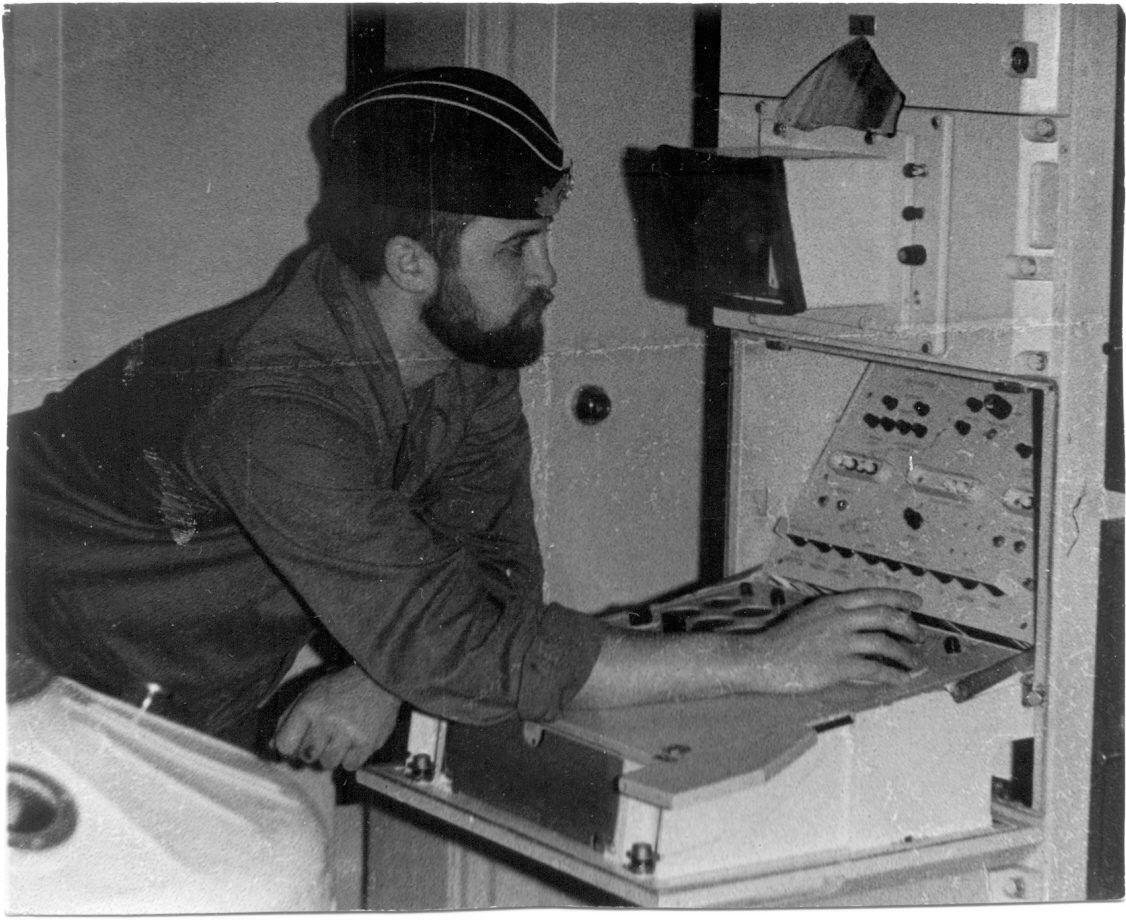
Радиосекстан "Снегирь", прибор 9.
Рпксн К-460, гиропост. Старшина команды штурманских электриков А.П. Каторгин готовится в измерениям.
На заднем плане видны стойки системы "Тавда-С".
Фото из архива А.П. Каторгина.
Завершить обзор нужно большим контуром навигационных задач, приёмоиндикаторов радионавигационных и спутниковых систем,
гидроакустических и радиолокационных навигационных систем, который решал БИУС "Алмаз" в режиме НАВИГАЦИЯ.
Этот режим имел большие возможности - от определения места разичными способами, до автоматического вождения лодки по заданному маршруту
и расчётов таблиц освещённости. Все задачи решались с пульта 101Ш БИУС "Алмаз", установленного в штурманской рубке.
Режим автоматического вождения по заданному маршруту был интересен, управлял им штурман с пульта 101Ш, но очень не нравился
центральному посту. В этом режиме ему просто нечего было делать. Лодка сама поворачивала и оставалось только принимать доклады штурмана.
Нарушалась установившаяся и привычная организация управления кораблём.
Поэтому этот режим включали только для практики и иногда для разнообразия. В общем довольно редко.
Опытные образцы инерциальной навигационной системы “Тавда” были изготовлены в 1970 г.
Испытания проводились на заводе-изготовителе, после чего системы "Тавда", "Тавда-С" и "Перекоп" были установлены на опытном судне ОС-19 121 брдк
Северного флота.
Это был эсминец проекта 30бис "Ожесточённый", переклассифицированный в опытовое судно. На нём была законсервирована часть вооружения,
демонтировано некоторое оборудование, сокращена штатная численность экипажа. Увеличено количество спальных мест для размещения научных и
технических групп.
В освободившихся помещениях в районе миделя на второй палубе были установлены плита, инерциальная система "Тавда", система "Тавда-С",
пульт управления ИНС, система "Перекоп", пульт технического обслуживания и контрольно-измерительная аппаратура.
Для повседневного обслуживания опытных образцов в БЧ-1 введены должности командира ЭНГ и инженера ЭНГ.
Мне довелось побывать на ОС-19 и выходить на нём в море для испытаний новой ИНС "Тисса", которая была установлена взамен одной из ИНС Т-21
"Тавда".
Это было осенью 1973 года, эту стажировку я описал в воспоминаниях в разделе МЕМУАРЫ сайта К-460. Тогда познакомился с разработчиками
и инженерами НИИ "Дельфин", довольно глубоко изучил теорию и документацию ИНС "Тавда" и это очень помогло в освоении НК "Тобол-Б2"
уже на своей лодке.
А далее у комплекса началась полноценная подводная жизнь.
К 1969 году, когда ещё шли испытания системы "Тавда" на ОС-19, в основном был сформирован облик НК "Тобол" и шло создание его компонентов.
НИИ "Дельфин" и все контрагенты в Москве, Ленинграде, Казани, Бельцах и во многих других городах изготавливали приборы и системы комплекса
и некомплексные приборы для поставки на подводную лодку.
В качестве головной лодки с навигационным комплексом "Тобол" была определена подводная лодка проекта 667А К-245, девятнадцатая
в серии из 24-х лодок этого проекта, построенных на Северном машиностроительном предприятии.
Командир подводной лодки А.С. Афанасьев, командир БЧ-1 О.Г. Просандеев, младшие штурмана О.Н. Лазарев и С.А. Корчагин.
31 марта 1969 года К-245 зачислена в состав ВМФ, а 16 октября того же года заложена на стапеле цеха №50 СМП. На завод начали поступать
компоненты НК "Тобол" и устанавливаться на лодку. К августу 1971 г. монтаж НК "Тобол" был в основном завершен.
9 августа 1971 г. подводная лодка К-245 была выведена из цеха и оставлена в сухом доке цеха №50. Это был довольно редкий, если не единственный
случай в истории завода, когда лодку после вывода из цеха не поставили к дебаркадеру у достроечной стенки.
Вот что пишет об этом периоде Е.Н. Чеповик, начальник Химической службы подводной лодки К-245 с мая 1969 по май 1977 года.
Воспоминания можно прочесть здесь:
Капитан 1 ранга Чеповик Евгений Николаевич о К-245
Все фото с К-245, помещённые ниже, взяты также со страницы Е.Н. Чеповика.
======================================================
Особенности рпксн К-245 прежде всего связаны с тем, что на ней впервые установлен инерциальный навигационный комплекс «Тобол».
Правильнее было бы назвать, что корабль сдается в опытную эксплуатацию. И последующие планы штабов дивизии и флотилии совпадали с
программой испытаний именно навигационного комплекса.
Поскольку он установлен впервые, то никто ни из военных, ни от НИИ «Дельфин» не мог сказать, как он себя поведет. Именно по этой причине
все старались на него даже не "дышать". Опыт эксплуатации вообще отсутствовал. Но ведь навигационный комплекс надо было сдавать вместе с кораблем.
И промышленность шла на любые условия науки только бы сдать этот комплекс.
Так и получилось что когда лодка встала в сухой док, то док заполнили водой только настолько, чтобы обеспечить работу систем и механизмов,
а сама пл чтобы оставалась на кильблоках. В этом случае на пл не сказывались волнения, крен и дифферент. Они просто отсутствовали.
Продувание ЦГБ и других цистерн было запрещено, все, что могло хоть как то повлиять на работу комплекса, было исключено.
Два с лишним месяца шли замеры и вылизывание комплекса. И когда были получены приличные результаты, подводную лодку вывели из сухого дока
и поставили к дебаркадеру.
Замеры продолжились, но уже на плаву. Большой разницы в замерах не обнаружили.
Но все прекрасно понимали ответственность и важность этих замеров. И если навигационный комплекс позволял хотя бы сутки хранить место
подводной лодки без коррекции, то это был очень серьезный шаг в развитии подводных ракетоносцев.
Прежде подводные лодки из-за слабых технических характеристик навигационного комплекса вынуждены были проводить предстартовую обсервацию
и определять поправку курса, чем нарушалась скрытность пл и ее боевая устойчивость. Кроме того увеличивалось время от получения сигнала
боевого управления до фактического применения оружия.
А с принятием на вооружение нового инерциального навигационного комплекса, эти недостатки устранялись. Отпала необходимость в предстартовой
обсервации, определения поправок курса и появилась возможность производить стрельбу в кратчайший срок.
А следовательно повышалась боевая устойчивость рпксн и шансы успешно нанести ответно-встречный удар.
В середине октября 1971 г. К-245 вывепи из сухого дока и поставили к достроечной стенке, что хорошо сказалось на экипаже.
Питание личного состава организовано в столовой 41 цеха (и более вкусно, и не надо тратить время и силы на переход личного состава
с завода на беререговую базу).
Улучшилась организация службы и вахты на пл. Дежурство по кораблю ввели с 9 августа, первым дежурным был назначен командир БЧ-1
капитан 3 ранга О.Г. Просандеев. Вахту несли паралельно со сдаточным экипажем, который был старшим до 16 декабря 1971 г., когда
был подписан акт приемки подводной лодки К-245 государственной комисией.
======================================================
После подписания Акта государственной комиссией, подводная лодка К-245 перешла в бухту Ягельная и была включена в состав 31 дпл 3 флпл СФ.
Промышленность и военные готовились к решающему этапу испытаний НК "Тобол" во всём широтном диапазоне. Низкие широты вплоть до экватора
необходимы были для подводных лодок проекта 667А и их модернизированному варианту 667АУ.
А высокие широты и Северный полюс нужны были для будущих арктических ракетоносцев проекта 667Б, головной из которых, К-279, уже был заложен
30 марта 1970г. и 20 декабря 1971 г., т.е. всего через четыре дня после подписания Акта на К-245, выведен из цеха и поставлен к дебаркадеру
у достроечной стенки СМП.
Возможно, что экипаж К-245 видел перед уходом эту лодку, К-279, но конечно не предполагал, что именно в её интересах он пойдет осенью 1972 года
на Северный полюс.
Думаю, что руководство технической группы НИИ "Дельфин", которая монтировала и готовила к испытаниям НК "Тобол-Б" на К-279 знала об этих планах,
но для широкого круга подводников и промышленности эти сведения были недоступными.
НИИ "Дельфин" и контрагенты вели интенсивную работу по изготовлению серийных образцов НК "Тобол" для подводных лодок проекта 667А. Анализ
сроков сдачи лодок позволяет сделать вывод о том, что в 1971-1972 годах ими было изготовлено не менее восьми образцов навигационного комплекса
"Тобол"! Шел буквально поток новых комплексов!
В это же время НИИ "Дельфин" завершил создание НК "Тобол-Б" и вовсю работал над созданием НК "Тобол-Б2" и "Тобол-Б3".
И одновременно шло изготовление образцов этих комплексов для серии лодок проекта 667Б. Ведь уже к началу 1974 года практически на всех лодках
проекта 667Б были установлены или завершался монтаж и наладка НК "Тобол-Б", "Тобол-Б2" и "Тобол-Б-3".
В период учёбы в Палдиски нам довелось побывать на некоторых предприятиях промышленности и мы видели, какое громадное количество людей занято
на производстве этой сложной техники.
Колоссальная работа!
А пока в Гаджиево, Североморске и в Москве готовились к решающим этапам испытаний - океанским, в том числе подлёдным, испытаниям НК "Тобол".
Испытательные походы рпксн К-245 с навигационным комплексом "Тобол"
По материалам страницы Е.Н. Чеповика, ссылка дана выше, и сборника К.Я. Богомазов "Истинным курсом в науке и Мировом океане". СПб,
ООО "Остров", 2022.
НИИ "Дельфин" совместно с 9 НИИ ВМФ разработали программу всеширотных испытаний, которая была рассмотрена и утверждена командованием ВМФ.
Главный штаб ВМФ, штаб Северного флота, штабы 3 флпл и 31 дпл СФ разработали планы походов К-245 для испытаний НК "Тобол", планы подготовки
к ним и всестороннего обеспечения. Военные предусматривали разработку и проверку тактики использования лодок с НК "Тобол", которая существенно
отличалась от тактики лодок проекта 667А с НК "Сигма-667".
В короткое время были сформированы группы похода - командования и штабов, научной и технических групп. Организована их всесторонняя подготовка.
Планом испытаний были предусмотрены два похода в 1972 году.
Первый поход - на экватор. Старшим на этот поход был назначен заместитель командира 31 дпл В.П. Кузнецов.
Второй поход - на Северный полюс. Старшим на этот поход был назначен начальник штаба 3 флпл СФ В.Н. Чернавин.
Экипаж К-245 был штатный, который участвовал в постройке и приёмке корабля от промышленности. Ещё раз напомню руководство штурманской его части.
Командир подводной лодки А.С. Афанасьев, который по смыслу является первым штурманом на любом корабле, определяет и утверждает все решения
командира БЧ-1, старшего штурмана.
Командиром БЧ-1 в этих походах был О.Г. Просандеев, младшие штурмана О.Н. Лазарев и С.А. Корчагин.
Отдыхал ли экипаж К-245 после завершения постройки, неизвестно, сведений об этом нет. Думаю, что организованного отдыха не было, кратковременно
отдыхали и решали семейные дела по очереди.
По некоторым данным председателем Государственной комиссии по приёмке НК "Тобол" был назначен командир 31 дпл 3 флпл СФ
контр-адмирал Л.А. Матушкин, а его заместителем - Флагманский штурман Северного флота капитан 1 ранга А.Н. Яковлев.
По ряду причин председатель Государственной комиссии в поход на экватор пойти не мог, поэтому старшим на борту в первом походе был
заместитель командира 31 дпл В.П. Кузнецов. Во втором походе, на Северный полюс, Л.А. Матушкин участие принимал.
Флагманским же штурманом обоих походов был назначен флагманский штурман Северного флота Яковлев Анатолий Николаевич, имевший опыт плавания на
атомной подводной лодке К-27 проекта 645 с навигационным комплексом "Плутон-1" на экваторе.
Научно-техническая группа была сформирована из специалистов НИИ "Дельфин, к сожалению их фамилии установить не удалось.
К середине лета 1972 года подготовка К-245 к испытаниям завершена и лодка вышла на первый этап океанских испытаний.
С 7 по 30 июня 1972 г. лодка сходила из Гаджиево на экватор и обратно. Судя по срокам, хода на переходе были приличные, а сам поход был очень
интересным. Представляю состояние штурманов и промышленности, которые наблюдали поведение ИНС с уменьшением широты по пути на экватор и обратным
увеличением её по пути домой!
Работа группы кипела день и ночь, собирался обширный материал для последующего анализа.
Уверен, что впечатлено было и командование, находившееся на лодке. Ведь они были свидетелями и сами творили новую тактику использования
лодок проекта 667А!
Забегая вперёд, скажу, что в очень короткое время после походов К-245 9 НИИ ВМФ разработал и выпустил руководящие документы по маневрированию
лодки и использованию НК "Тобол" при применении оружия. Некоторое время и мы на лодках проекта 667Б руководствовались этими документами,
пока не были разработаны и изданы документы по НК "Тобол-Б", "Тобол-Б2" и "Тобол-Б3".
Немногим более двух месяцев потребовалось для подготовки К-245 ко второму походу, на этот раз на Северный полюс. Поход под лёд лучше было бы провести во второй половине лета, когда на полюсе ещё светло, но по ряду причин он состоялся в октябре. Плавание ракетной лодки и всплытие во льдах в октябре месяце явилось хорошим опытом для действий будущих арктических ракетоносцев, первый из которых, К-279, уже проходил ходовые испытания и в декабре 1972 года прибыл в Гаджиево.
10 - 29 октября 1972 г. подводная лодка К-245 совершила второй поход по программе испытаний НК "Тобол".
Старшим на борту был начальник штаба 3 флпл СФ В.Н. Чернавин. В поход вышли также председатель Государственной комиссии по приёмке НК "Тобол"
командир 31 дпл Л.А. Матушкин и флагманский штурман 3 флпл СФ В.В. Владимиров.
Как и в первом походе кроме испытаний НК "Тобол" отрабатывалась тактика несения боевой службы ракетными подводными лодками в охранении
многоцелевых лодок.
Охранение при подлёдном плавании К-245 осуществляла многоцелевая атомная подводная лодка К-438 проекта 671, командир подводной лодки В.Н. Шувалов, старший на борту командир 3 дпл
1 флпл СФ Ф.С. Воловик. На подводной лодке был установлен штатный всеширотный навигационный комплекс "Сигма-671" с режимом квазикоординат.
По некоторым неподтверждённым данным, в этом походе подводная лодка К-245 по пути на Северный полюс, выполнила ракетную стрельбу практической
ракетой Р-27 из Гренландского моря по назначенному району в Атлантическом океане. НК "Тобол" обеспечил требуемую точность навигационных данных
стрельбы, ракетная стрельба признана успешной.
После ракетной стрельбы лодка продолжила плавание, в планируемое время перешла в квазикоординаты и 21 октября 1972 г. пришла на полюс.
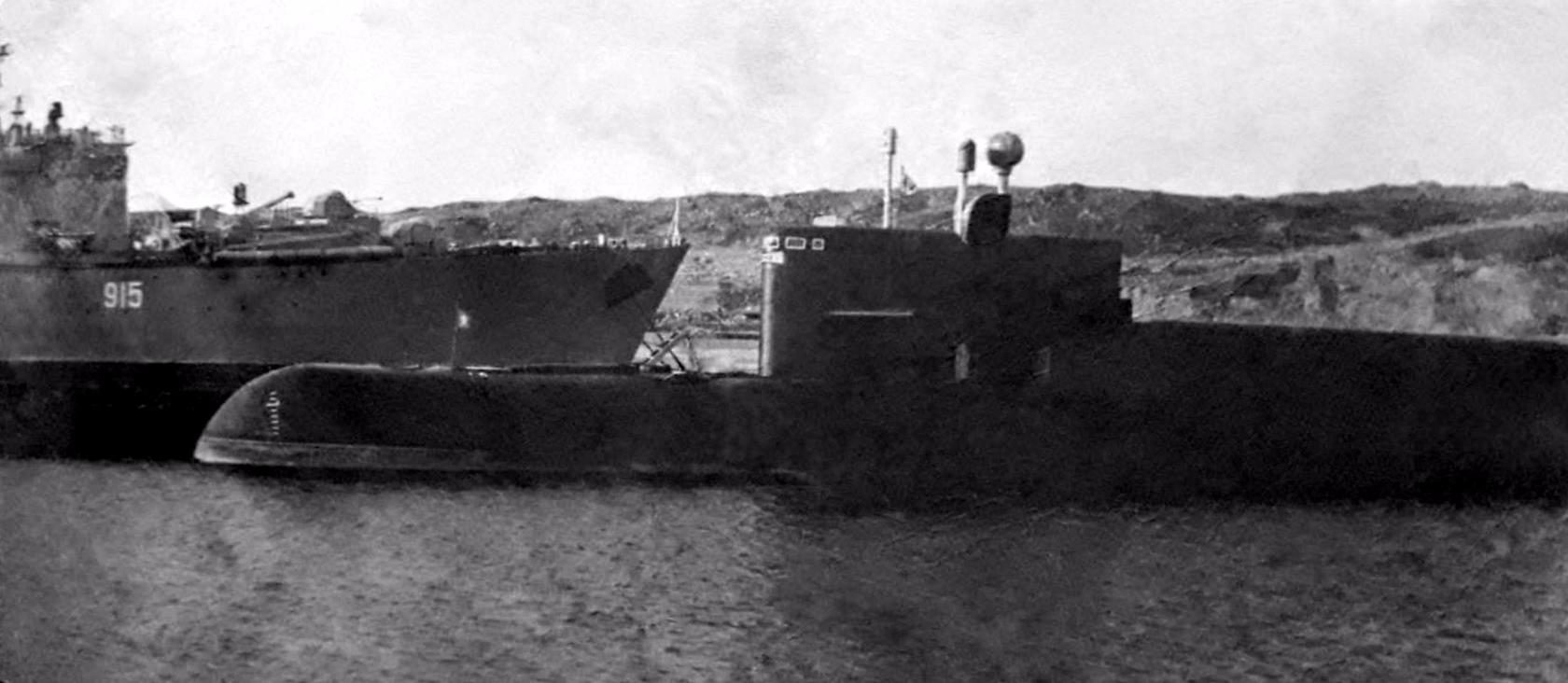
Впервые была решена задача поиска и обнаружения полыньи для ракетной подводной лодки в тёмное время суток с последующим всплытием
и освобождением ракетной палубы ото льда.
Удалось найти полынью размером не менее 180х50 метров в непосредственной близости от Северного полюса. Лодка успешно всплыла и выполнила
действия по программе испытаний и применению оружия. Над водой было уже темно.
Фото, сделанные 21 октября 1972 г. на Северном полюсе.
Часть экипажа К-245 у рубки подводной лодки.
В центре командир лодки капитан 1 ранга А.С. Афанасьев.

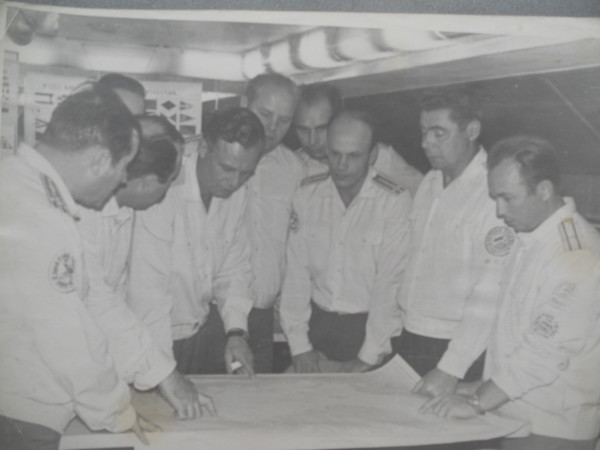
Походный штаб на К-245 в кают-компании, совещается. Слева направо:
флагманский механик 31 дивизии капитан 1 ранга Колтон;
rомандир пл К-245 капитан 1ранга Афанасьев Анатолий Степанович;
руководитель похода контр-адмирал Чернавин Владимир Николаевич;
начальник особого отдела 3 флотилии капитан 1 ранга Худяков;
флагманский связист 3 флотилии капитан 2 ранга;
флагманский штурман 3 флотилии капитан 1 ранга Владимиров Владимир Владимирович;
командир 31 дивизиии Матушкин Лев Алексеевич;
флагманский РТС 31 дивизии капитан 3 ранга Михайлов Сергей.
Перед походом К-245 на полюс была взята Гаджиевская земля вблизи монумента "Героям-подводникам".
На полюсе была произведена закладка Гаджиевской земли в капсулу, после чего капсула прикреплена к флагу, который воодружен на Северном полюсе.
На фото в кают-компании, закладка земли в капсулу, слева направо:
начальник РТС К-245 капитан 3 ранга Трифахин Юрий Михайлович;
начальник штаба 3 флотилии КСФ контр-адмирал Чернавин Владимир Николаевич;
начальник особого отдела 3 флотилии капитан 1 ранга Худяков;
командир 31 дивизии контр-адмирал Матушкин Лев Алексеевич;
командир лодки К-245 капитан 1 ранга Афанасьев Анатолий Степанович;
флагманский штурман Северного флота капитан 1 ранга Яковлев Анатолий Николаевич.

Через месяц после возвращения подводной лодки К-245 в Гаджиево, 24 ноября 1972 г. она была награждена Вымпелом Министра обороны СССР "За мужество и воинскую доблесть".
А командование, Государственная комиссия и флагманские специалисты засели за отчёты и разработку руководящих документов.
В начале 1973 года навигационный комплекс "Тобол" был принят на вооружение ВМФ.
Заключение
Вот такова была история создания первых советских инерциальных систем и первого инерциального навигационного комплекса.
Плавая с ним, штурман был "зрячим", было видно куда нас сносит и где мы скорее всего окажемся, когда всплывём на обсервацию.
Высокая автоматизация облегчала работу штурманов, повышала обеспечение ракетного комплекса.
Началась эра инерциальной навигации.
Быстрыми темпами создавались новые инерциальные навигационные системы, которые включались в состав новых навигационных комплексов
подводных лодок, а затем и надводных кораблей.
Спасибо советской науке и промышленности, конструкторам, инженерам и рабочим!